1 / 5


| Item | Specifications | |
|---|---|---|
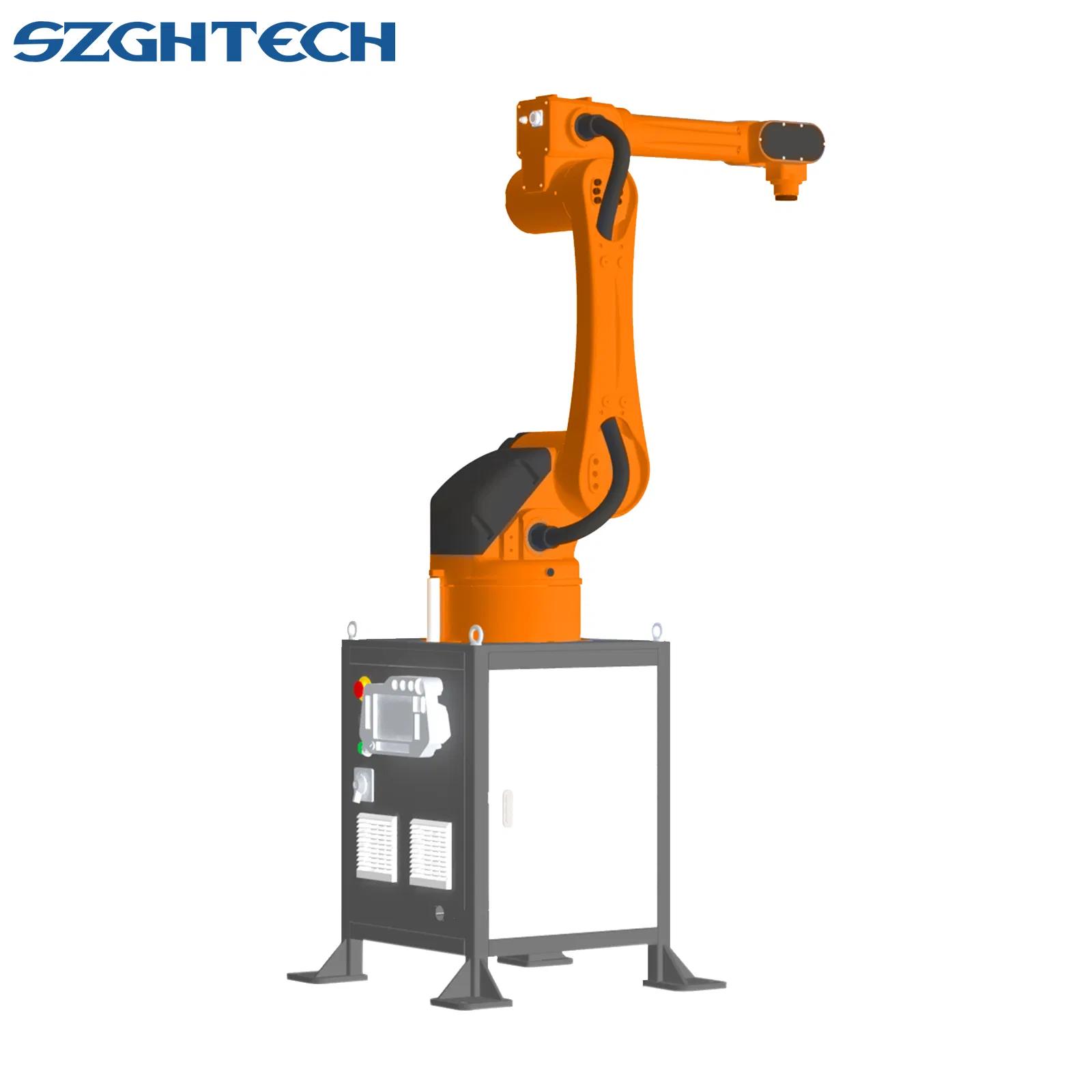
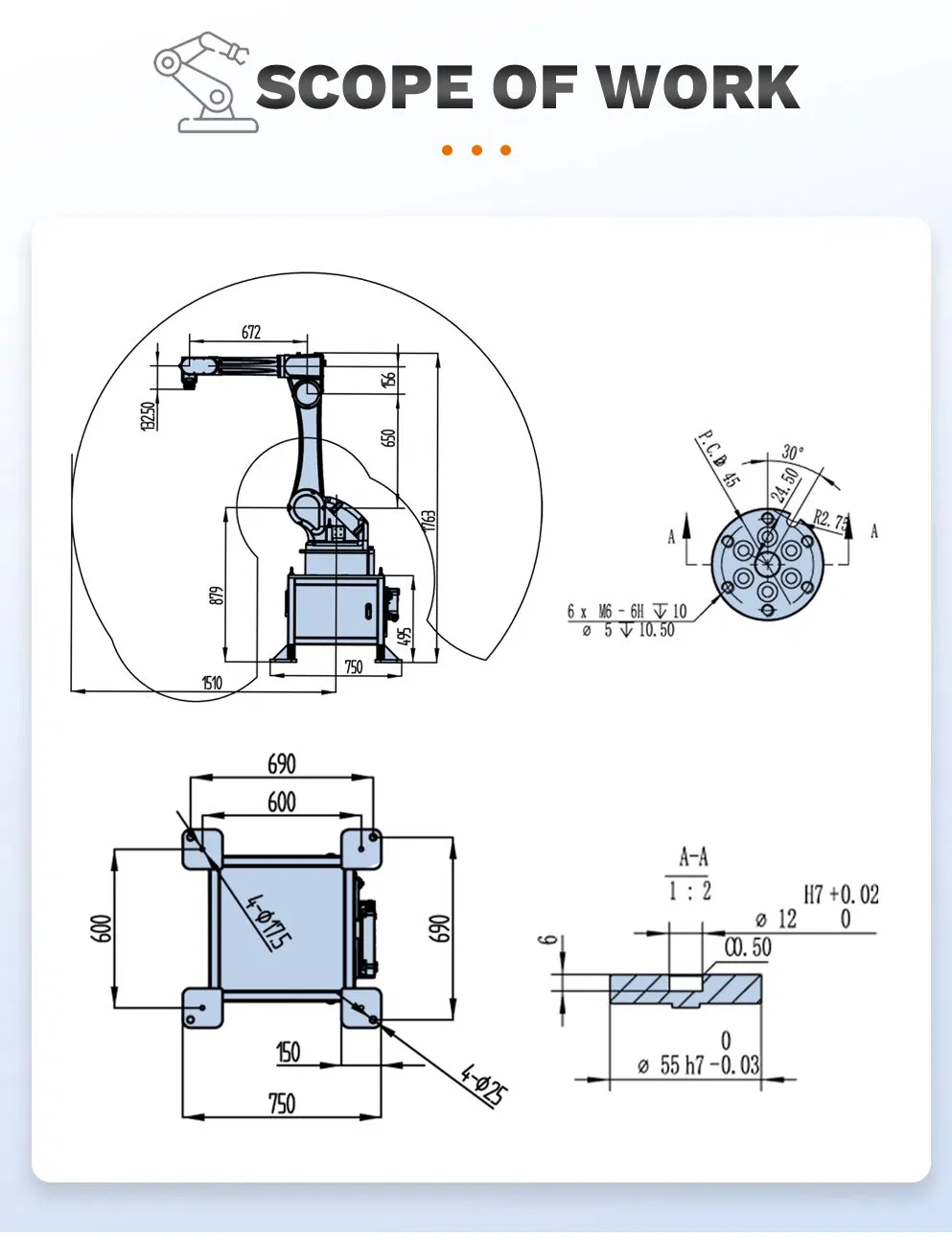
| Robot model | SZGH-T1600-10C | |
| Structure | Integrated | |
| Number of axes | 6 | |
| Drive system | AC servo system | |
| Max.working range | J1 | ±180° |
| J2 | +75~-110° | |
| J3 | +110~-75° | |
| J4 | ±180° | |
| J5 | +30~-200° | |
| J6 | ±360° | |
| Axis Max.speed | J1 | 148°s,2.58rad/s 297/s,5.18rad/s) |
| J2 | 148°/s,2.58rad/s 297°/s,5.18rad/s | |
| J3 | 297°/s,5.18rad/s | |
| J4 | 450°/s,7.85rad/s | |
| J5 | 225°/s,3.93rad/s | |
| J6 | 450/s,7.85rad/s | |
| Maximum load | Wrist | 10kg |
| Item | Specifications | |
|---|---|---|
| Allowable static load torque for wrist | J4 | 20.4 Nm |
| J5 | 20.4 Nm | |
| J6 | 12.7 Nm | |
| Allowable static load torque for wrist | J4 | 0.42kgm² |
| J5 | 0.42kg ·m² | |
| J6 | 0.15kg ·m² | |
| Max.reach | 1510 mm | |
| Position repeatability | ±0.05 mm | |
| Air piping(Option) | φ10×1 | |
| Noise level | 70dB(A) | |
| Rate power | 4.35KW/5.35KW | |
| Rate voltage | Single-phase 220V | |
| Installation | Ground-mounted | |
| Ambient conditions |
Ambient temperature: 0~45℃ Ambient conditions: 20~85%RH Ambient humidity(without condensation) 0.5 G(4.9 m/s 2)Hereinafter Vibration |
|
| Environmental performance | IP65 | |
| Robot mass | 195 kg | |