1 / 5

| Name | Description |
|---|---|
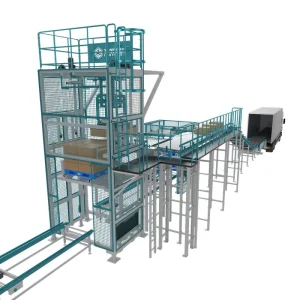
| Belt Conveyor | After manual or robotic bag loading, it conveys the bags into the bag unpacking machine. |
| Bag Unpacking Machine | Cuts open the bags and separates the materials from the bags. |
| Waste Bag Collector | Collects the unpacked waste bags. |
| Discharging Hopper | Material outlet, which connects to the user's equipment at the rear end. |


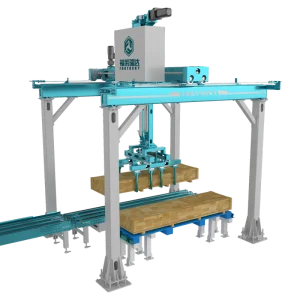
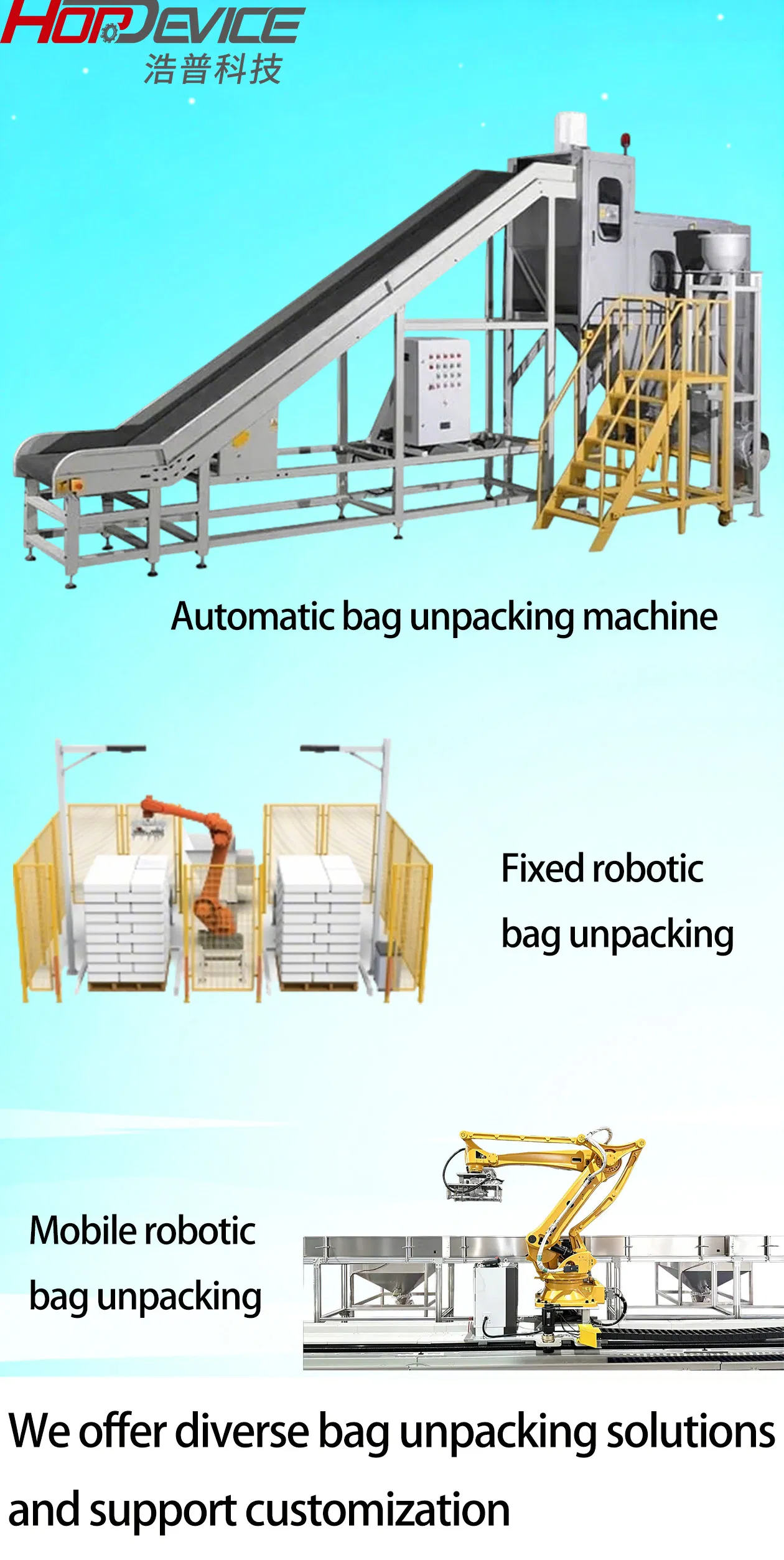
The stack is identified and positioned by a 3D vision system to determine the position and orientation of the bags. Based on the bag coordinates output by the 3D vision algorithm, the robot controls the end-effector to accurately grasp the bags and place them at the designated location.
The 3D vision system locates and guides the recognition of the stack. The robot controls the end-effector to grasp a bag and lift it above the bag cutting device. The cutting device slits the bag according to a preset program and method. After the robot swings the bag to empty the material, the empty bag is discarded into a waste bag collector.
| No. | Name | Description |
|---|---|---|
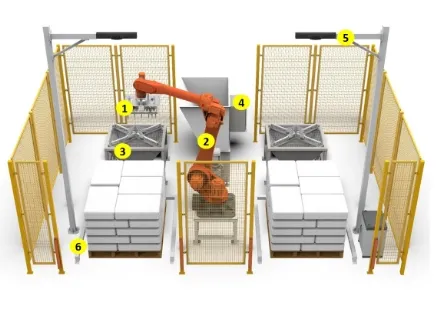
| 1 | End Effector Fixture | Grasp material bags for bag unpacking operation. |
| 2 | Robot Arm | Execute pre-programmed procedures and control the robot's end effector fixture for operation based on data fed back by 3D vision. |
| 3 | Bag Unpacking Hopper | Break open the bags and buffer the materials. |
| 4 | Waste Bag Collector | Break open the bags and buffer the materials. |
| 5 | 3D Camera Mounting Bracket | Used for on-site installation of 3D camera. |
| 6 | Bag Stack Limit Frame | Prevent deviation of bag stack placement from the recognition range of the 3D camera. |